(Click on underlined
link to go to subject)
Chapter 1. Vision
System Design
Chapter 2. Biological Eye Designs
Chapter
3. Eye
Design
Illustrations
Chapter
4. Eye
Reproduction
Chapter
5. Optical
Systems
Design
B.
Manufactured
optics
1.
Astronomy
and
surveillance
2.
Stable
platform for
optical systems
3.
Robotic
camera
applications
4.
Flying
robotics
5.
Microscope
and
endoscopic applications
6. New
technologies to see building blocks of cells
C. Present vision system technology approaches toward artificial eye development
D. Integration
of mans technology with
biological eyes
Chapter
6. The Eye Designer
Related
Links
Appendix
A - Slide Show & Conference Speech by Curt Deckert
Appendix
B - Conference Speech by Curt Deckert
Appendix
C - Comments From Our Readers
Appendix
D - Panicked Evolutionists: The Stephen Meyer Controversy
Chapter 5
Sections A and B
(Click on PICTURE IN TEXT to bring up LARGE PICTURE)
5. OPTICAL SYSTEM
DESIGNS
LEADING TO ARTIFICIAL
EYES
A.
Introduction
Present machine
vision systems are very limited in overall capability as compared to
most
biological eyes. Comparing eye-type optical systems in the 1990's with
nature's eyes is much like the Wright brothers' aeronautical science
being
compared to spacecraft of the late 1990's. As we learn more about
biological
eyes, we understand they have specific cell designs, not random chance
mixtures of elements.
In the following sections we will consider optical systems that may
be foundational in developing technology to design and build special
purpose
“eyes” that approach the capabilities of those
found in nature. Reproduction
and continuous repair of nature’s eyes are far ahead of the
complex optical
systems man has designed. Since the living cell structure is dynamic,
the
repair function that goes on in the eyes' retinas is more advanced than
any adaptive image sensor man has been able to design.
B. Manufactured optics
As recently as several
centuries ago, the
wide spread use of lowest commercial optics such as lenses and mirrors
was limited. The earliest commercial uses of optics were, of course,
eyeglasses,
magnifiers, mirrors, telescopes, and microscopes. After hundreds of
years
of optical component design and production, there are now a wide
variety
of commercially available optical building blocks with many choices of
materials, and technologies for the development of new optical systems.
As optical industries developed, manufacturing technology and
efficiency
enabled lower cost optical products, thereby increasing their use.
Optics
in television and motion picture industries gave entertainment to the
world's
population.
Early attempts to duplicate
the eye's function
of capturing images were limited to film cameras, which have been
around
for more than 150 years. As we all know, film cameras can only sense a
limited number of frames or pictures, which have to be processed or
developed.
But video cameras, which have only been around since the 1940's, can
sense
a large number of scenes for recording on tape, disk, hard disk or
other
computer memory. These scenes can be transferred directly to a computer
for image processing. Processing of electronic image information in a
computer
requires sensors, interface electronics, and software for recognition
for
what we may define as useful vision. During this century, scientists
and
engineers have made increasingly determined efforts to understand eyes.
The software and hardware for man's vision system did not just appear,
but required intelligence to develop.
Have we really
come very far in attempting to duplicate eyes?
We are just scratching the
surface of total
biological eye technology. There are many layers of information we have
not even penetrated. In trying to equal the size and function of the
eyes
of nature, the size of video cameras, computers, and electronic
components
has been greatly reduced. Image processing software and hardware has
come
closer to simulating eye functions, but these innovations are only
small
preliminary steps toward significant artificial eye design and
developments.
During the last 20 years, high-speed micro-circuitry, sensor arrays,
arrays
of micro lenses, gradient index materials, special glasses, and plastic
optics manufacturing techniques are starting to give us more suitable
building
blocks for artificial eyes. These components are still limited to
"non-living",
"non-reproducible" optical systems approaching the size of eyes we find
in nature.
The big challenge of optical
products is to
be affordably priced to reach large international markets. Most current
attempts at creating eyes are very simplified and less versatile when
compared
to biological eyes that are constantly reproduced from a variety of
cell
types from generation to generation. When living eyes are compared to
man's
ability to design optical systems that repair damaged building blocks,
we learn that living eyes are far advanced.
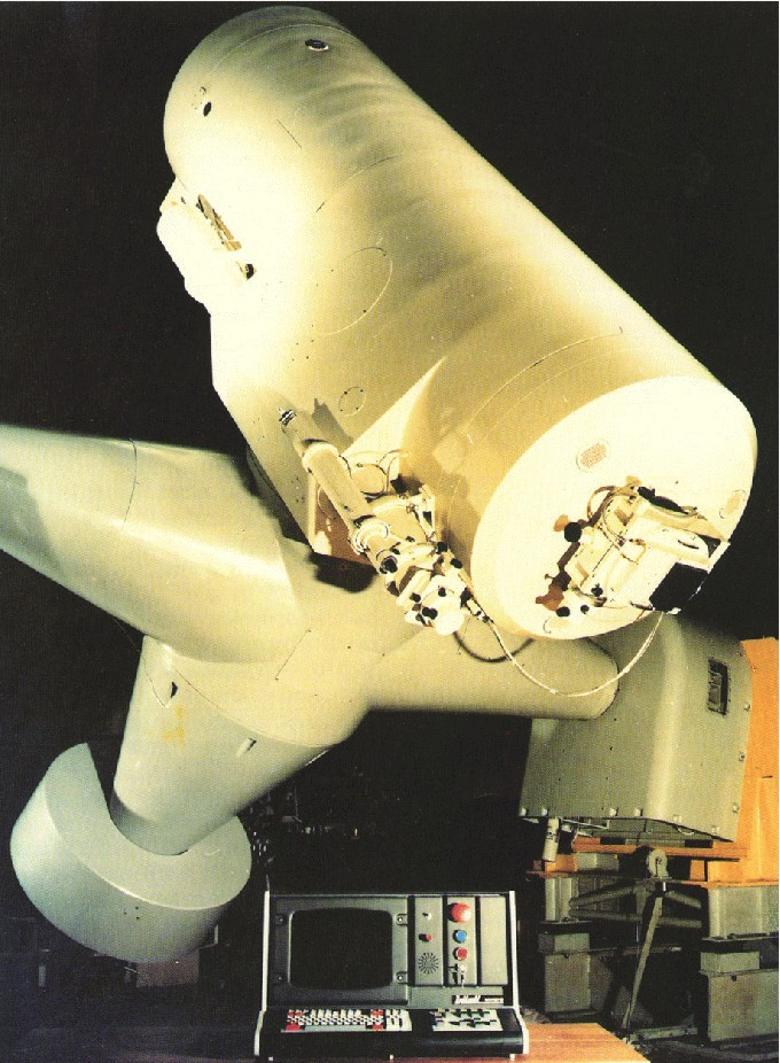
1. Astronomy and surveillance
Many of the large camera systems built for advanced study of space and for strategic military surveillance have very narrow fields of view. Man-made space camera systems that record movement, scenes, or events, generally require precision scanning and tracking ability. Vision systems are specifically designed to function from ground, ships, aircraft, and even satellites. Suitable platforms require different mountings and interfacing to be useful. Biological tracking systems are often taken for granted. Eye control design requires significant programming which requires many parallel brain interactions. A simple stable platform for optical equipment is shown on Fig.5-7. (Optical Equipment 2000 Catalog)

Instrument, about 1998) |
|
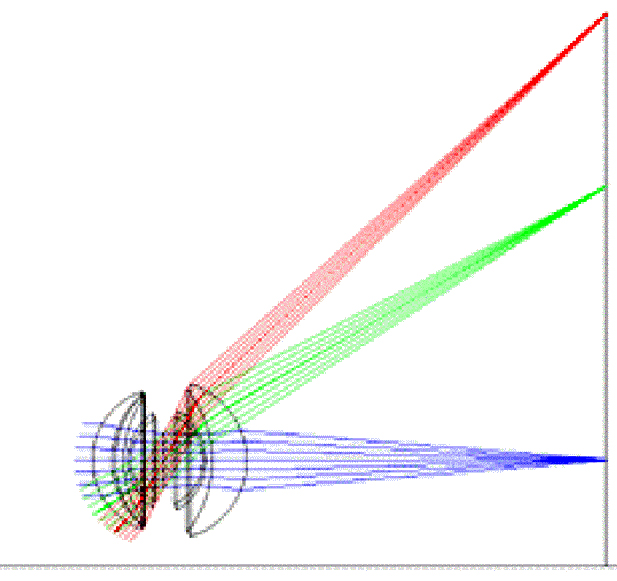
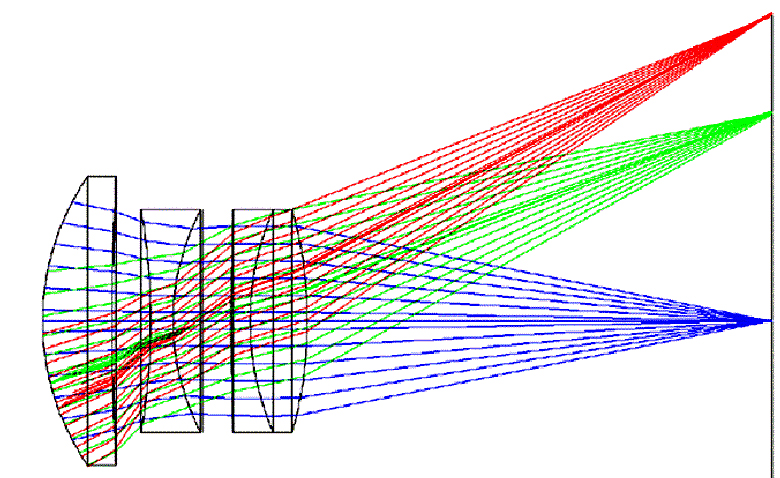
Camera Lens Optical Design |
Camera Lens Optical Design |
3. Robotic camera application
Early remote robotic camera
systems were developed to handle hazardous devices and substances. This
became necessary during the time nuclear energy sources were developed
in the 1940's. These remote handling systems were direct mechanical
devices using mirrors and/or windows to see from isolated viewing
areas. As motor drives and TV cameras with special optics were added to
mechanical systems, technicians were able to work farther away from
hazardous substances, while having as much control remotely as if they
were very close.
Machine vision system
containing small video cameras, or other sensors, and computer
controller systems has been used since the 1970's. Now machine vision
technology is using low-cost, high-resolution multicolor video cameras,
special lighting, high-speed computers, and special computer software,
for complex recognition purposes. As a result of these developments,
many workers who previously were exposed to chemical hazards have been
replaced or supplemented by robotic systems. These are examples of
conceptual evolution by intelligent selection.
In comparing typical computer communications and nature's "computer communications," just imagine thousands upon thousands of very small connections coming out of a video camera and going to a computer. Even though man has come up with very small integrated circuits, where connections on a computer chip can go down to as small as 0.15 micron, the interconnections between the computer chips are dramatically larger than the insect's tiny brain. Wires for attaching major computer subsystems are much larger in diameter than many insect vision system cables. Now imagine the size and cost of a cable made up of millions of wires going from a camera to a computer to process visual data. If we take wires the size of a human hair, or about 100 microns in diameter, then 1000 of these would be approximately 100mm wide. Such a cable would be larger in diameter than small cameras or computer plugs. This gives some perspective to the image processing complexity of nature's eyes.
More importantly, we have to remember an eye begins with a single cell and then grows by multiplying cells, while coordinating millions of different cells for the vision process. Imagine the intelligence to design, produce, integrate, and power all the different kinds of cells that go into vision systems. Just the powering of modern flying robots is still a very significant problem. Reproduction is even more of a problem to explain without intelligent design.
|
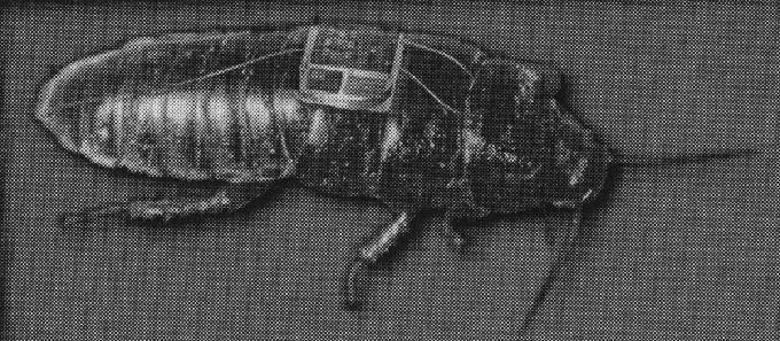
controls attached to insect (SPIE Micromachining & Microfabrication 1999 Symposium Technical Program) |
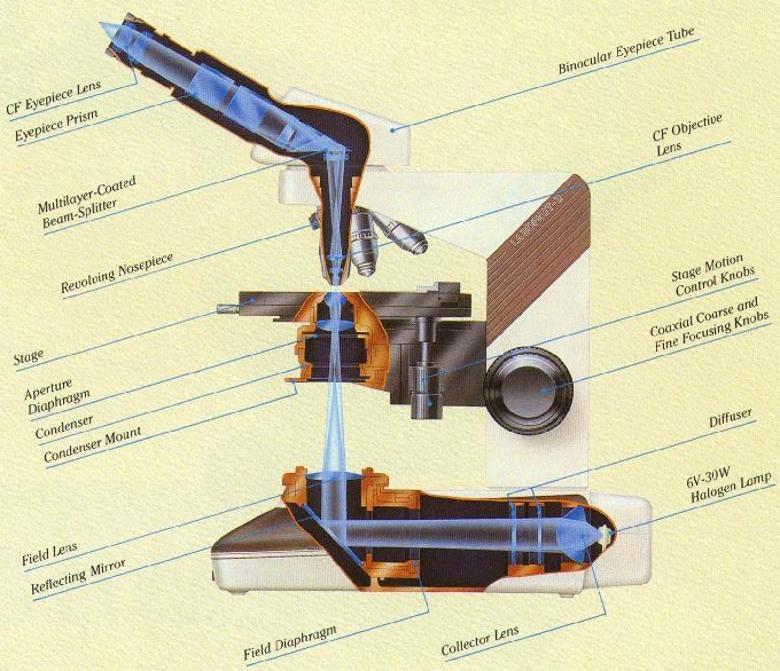
5. Microscope and endoscope applications
Microscopes have a long
history of specialized use for research. Now they are used more widely
in businesses, schools, and homes. Optical microscopes are able to
magnify cells over 1000 times to see them reproduce, to identify
abnormal cells, and to examine the design of molecular building blocks.
See the optical diagram of a typical microscope on figure 5-4.
Some new camera vision systems
are designed to have ultra violet (UV) imaging capability for high
technology areas, such as semiconductor fabrication. It takes very
high-resolution short-wave length UV image transfer capability and
analysis of quality for the production of today's integrated circuits
for computers. Considerable intelligent design and production effort
also went into developing the process for building very-
high-resolution UV systems for semi-conductor production.
Even fifty years ago, people
did not imagine the feasibility of producing these advanced
semi-conductor computers with sub-micron features. This technology
contributes to how we can produce small artificial vision systems using
human intelligence.
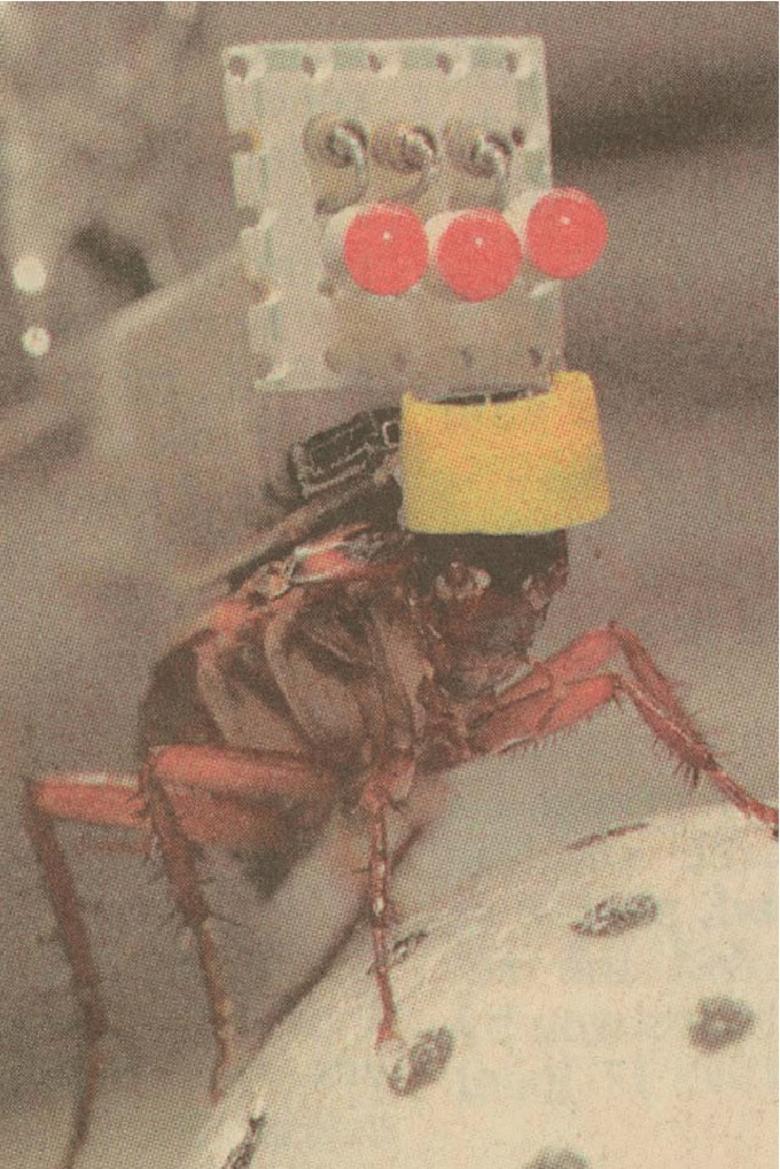
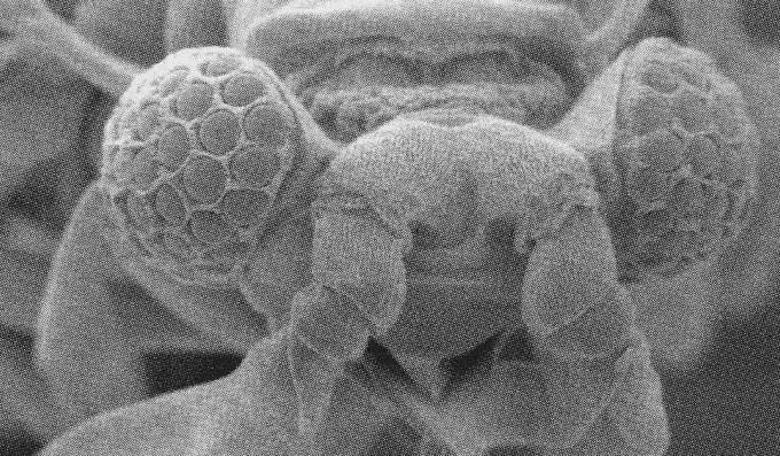
Some insects have UV
capabilities, which human eyes do not have. Insects are not able to see
shadows or forms with nearly as much resolution as humans, but they do
an effective job of rapidly sensing image motion as they travel. Much
of their rapid image processing seems to take place in the form of
motion sensing over part of a scene. This is quite different than
processing each complete scene in full color. One attempt to control a
cockroach is shown in figure 5-17. Here the man-made control mechanism
is quite crude compared to the basic insect.
In comparing IR eyes of nature
to typical video IR night sight vision systems, one can see great value
in the technology of nature's small compact IR eyes to provide remote
night-vision. This typically allows one to visualize distant
temperature sources or the temperature distribution of hot objects.
Improved compact IR vision systems may be developed as a result of new
viper eye research about IR vision capability.
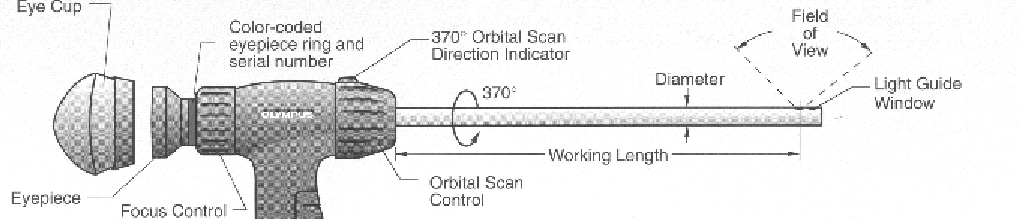
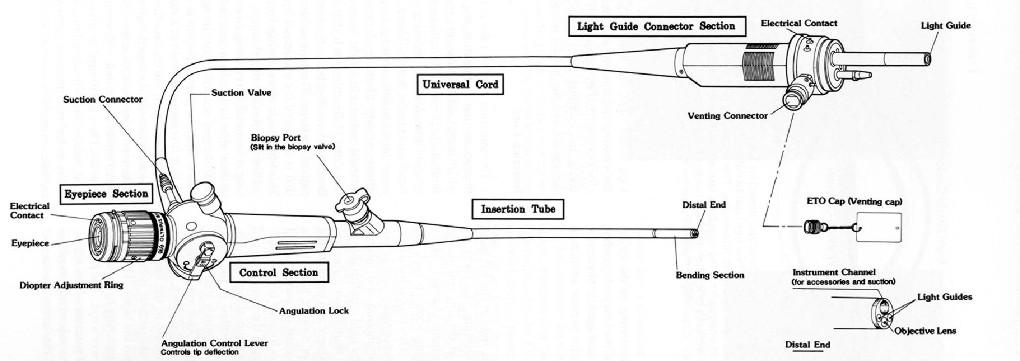
During the last 200 years,
straight optical bore scopes were developed to see into body cavities.
These developments led to new flexible optical endoscopes containing
flexible cables of glass or plastic fiber optics to transmit images.
Fiber optic endoscopes are much more versatile than straight bore
scopes that use optics to relay an image within a small tube.
6.
New technologies to see the building
blocks of cells
We have been able to see major
components of cells for some time, but have not been able to see
details of very small cell components. New technologies are starting to
let us see more of the fine details of the building blocks of nature,
such as the construction of chromosomes. Special man-made optical,
confocal, electron-beam, and atomic-force microscope systems can now be
used to study DNA and other key building blocks of life. The small DNA
features are beyond optical system diffraction limits, but electron
beam and atomic force microscopes allow scientists to form images of
fine details that can approach enough resolving power to sense the
presence of individual atoms that make up materials. These and other
new techniques may be required to see genetic DNA code information.
Because of the way sample eyes have to be prepared for analysis, it is
very difficult to work with live cells using electron beam microscope
procedures that may require the process of coating surfaces within a
vacuum chamber.
Optical sensor resolution is
beginning to approach that required to see the interconnecting
biological structure that makes up the very intricate nerve cells of
our retinas. New multi-color fluorescence cell analysis is starting to
provide detailed information on the selective functioning of the large
numbers of interconnections between the nerve cells required for
vision. Vision cells interconnections may include 10,000's of
connections per cell. These new discoveries are giving us new insight
into the complexity of our eyes' image processing system.
The size of these connections
is small relative to integrated circuits with conductors approximately
0.3 microns wide. This compares to molecules as much smaller building
blocks than the lines. We need to remember that it takes 10,000
angstroms to equal one micron or about 3,000 angstroms to equal a thin
conductor width. As a comparison, features of DNA code in cells are on
the order of 10 angstroms
Considerable design effort was necessary to form stable images for moving man-made vision systems, in order to provide feedback to control where the eye looks. This is no less true of eye stability design in nature. We are still learning how to build better, stable, moving optical systems leading to better vision system platforms. As we learn more about nature's eyes, it can help designers provide more stable structural mountings for optical systems.
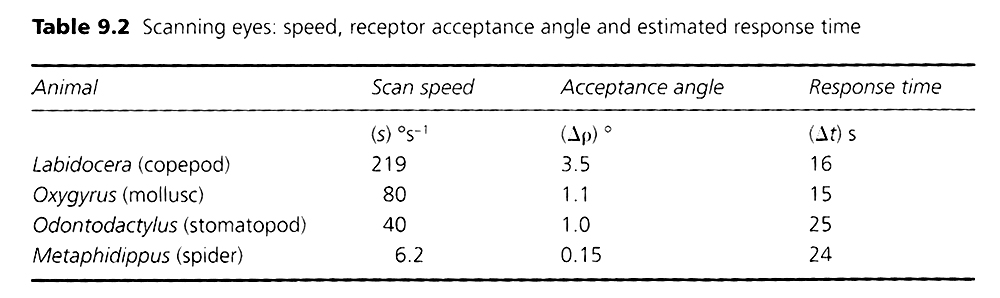
Many different scanning eyes are used in various small animals where the space and potential resolution is limited. This requires some special processing of the visual information, especially when used with additional Eyes that do not scan. The following table illustrates several applications of scanning eyes. (Reference: table 9.2, p. 197, Animal Eyes, Michael F. Land, Dan-Eric Nilsson, Oxford Animal Biology series, Oxford University Press, 2002- Please see their book for more details )
|